Robot Simulator¶
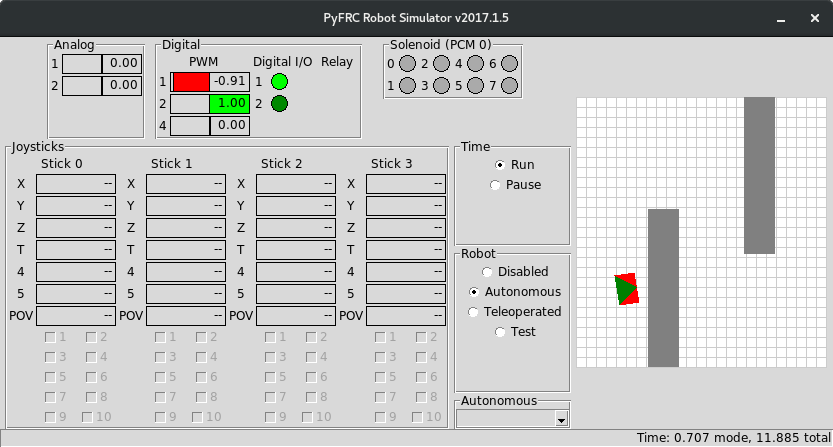
Screenshot of pyfrc simulator
An important (but often neglected) part of developing your robot code is to test it! Because we feel strongly about testing and simulation, the RobotPy project provides tools to make those types of things easier through the pyfrc project.
The pyfrc robot simulator allows very simplistic simulation of your code in real time and displays the results in a (ugly) user interface. To run the simulator, run your robot.py with the following arguments:
Windows: py -3 robot.py sim
Linux/macOS: python3 robot.py sim
As there is interest, we will add more features to the simulator. Please feel free to improve it and submit pull requests!
A new feature as of version 2014.7.0 is the addition of showing the robot’s simulated motion on a miniature field in the UI. This feature is really useful for early testing of autonomous movements.
Note
For this to work, you must implement a physics module (it’s a lot easier than it sounds!). Helper functions are provided to calculate robot position for common drivetrain types (see below for details). There are physics examples provided in the RobotPy Examples Repository for each supported drivetrain type.
Customizing The Simulator and Making Fields.¶
When you load your physics engine and copy the ‘sim’ folder from the example repository you should have a file in the ‘sim’ folder called config.json. The contents of config.json should look something like this:
{
"pyfrc": {
"robot": {
"w": 2,
"h": 3,
"starting_x": 2,
"starting_y": 20,
"starting_angle": 0
},
"field": {
"w": 25,
"h": 27,
"px_per_ft": 10,
"objects": [
{ "color": "grey",
"points": [ [7.25,11.21], [10.333,11.21], [10.333,27], [7.25,27] ] },
{ "color": "grey",
"points": [ [16.83, 0], [19.90, 0], [19.90, 15.75], [16.83, 15.75] ] }
]
}
}
}
This file is in JSON object format. To learn more about JSON read here https://www.w3schools.com/js/js_json_intro.asp
The “pyfrc” object is the main object which holds all the other values. “robot” contains specifics about the dimensions and starting position of the robot on the grid. “field” contains specifics for the field. The width, height, and pixels per foot. In here you can add a property called “image” and assign it a string with a path to an image in gif or png format like so.
"field": {
"w": 25,
"h": 27,
"px_per_ft": 10,
"image": "/path/to/your/code/sim/pic.png",
You can still draw shapes on top of the image in the “objects” property.
Communicating via NetworkTables¶
The simulator launches a NetworkTables server (just as the robot does), so it can be communicated with via standard NetworkTables tools (such as OutlineViewer, Shuffleboard, or SmartDashboard).
For this to work, you need to tell the client to connect to the IP address that
your simulator is listening on (this will be localhost or 127.0.0.1).
pynetworktables2js¶
pynetworktables2js will automatically connect to localhost if no arguments
are given.
OutlineViewer¶
You can type an address in when OutlineViewer launches, then tell it to start in client mode.
Shuffleboard¶
Shuffleboard can be configured to connect to localhost in the preferences.
SmartDashboard¶
Using SmartDashboard, you need to launch the jar using the following command:
$ java -jar SmartDashboard.jar ip 127.0.0.1
Real Joystick support via pygame¶
If you have pygame installed for Python 3, when you run the simulator any supported joysticks you have plugged in should automatically provide joystick input to the simulator.
Note
The easiest way to install pygame is to install one of the precompiled
wheels available on pypi via pip install pygame. This should work
on macOS, Windows, and Linux.
Installing pygame from source requires having a compiler installed, as it has many binary dependencies. It can be a tricky thing to accomplish, please refer to the pygame documentation for the right way to install it for your platform.
New in version 2015.3.6.
Gazebo simulation¶
This is currently experimental, and hasn’t been updated in awhile. If you want to play with it now (and help us fix the bugs!), check out the robotpy-frcsim github repository.
Next Steps¶
The next section discusses a very important part of writing robot code – Unit testing robot code.